POC Project
End-to-End Driving: 11V + LiDAR Fusion
A sparse-centric end-to-end autonomous-driving stack fusing 11 cameras (7 pinhole + 4 fisheye) with LiDAR. I owned the BEV-fusion CUDA operator and the AI-planner training.
Overview
What is this project about?
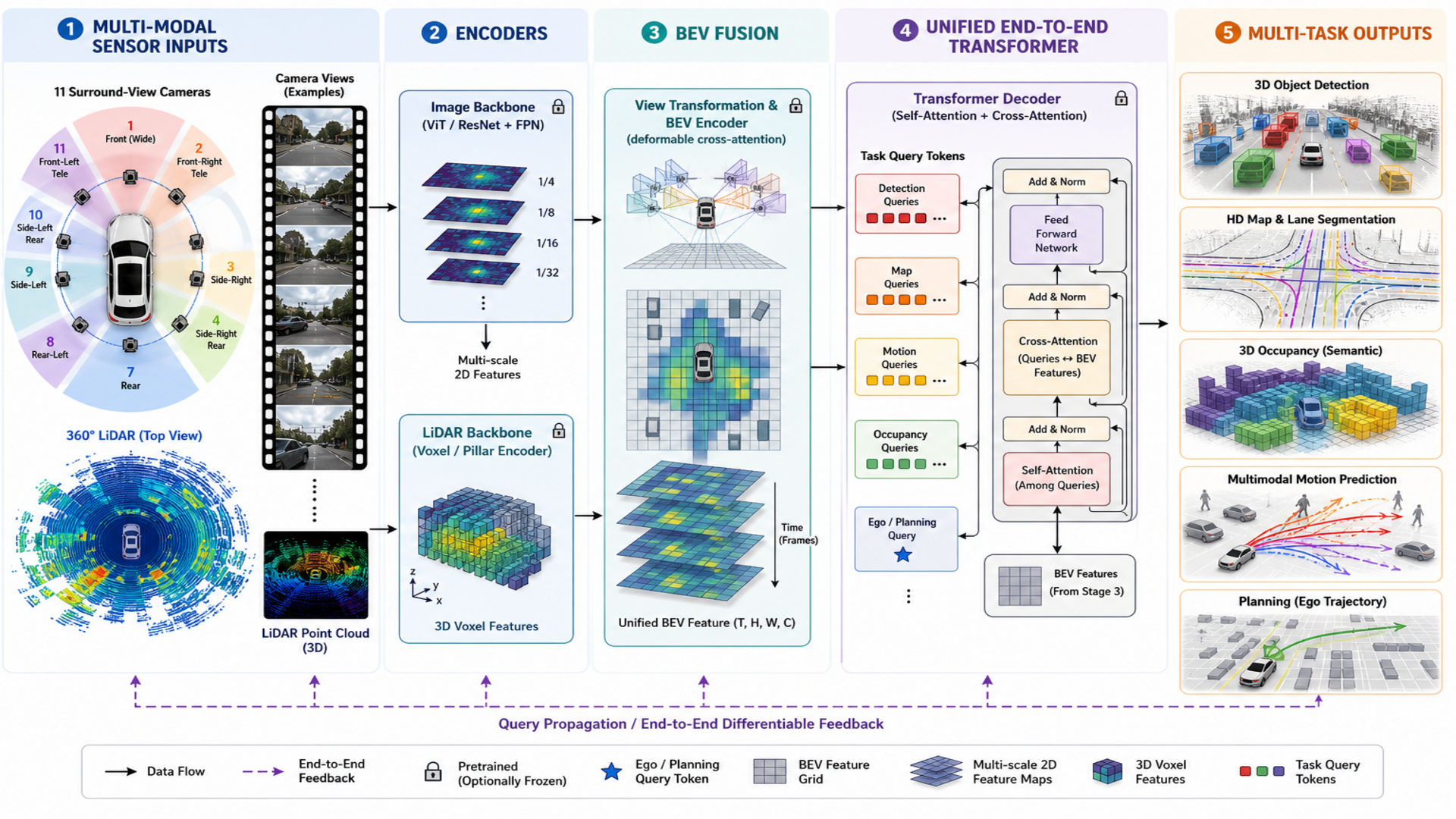
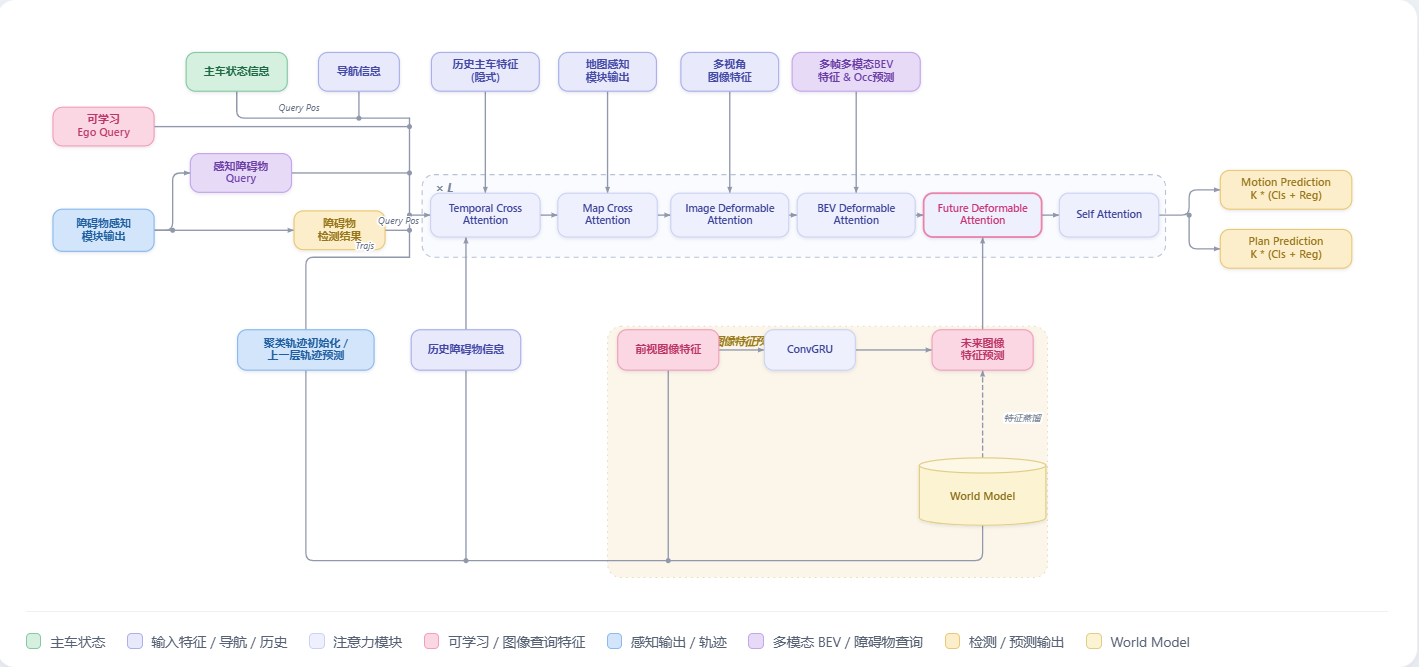
An end-to-end autonomous-driving system that fuses 11 surround cameras (7 pinhole + 4 fisheye) with LiDAR under a sparse-centric (SparseDrive-style) paradigm. My two core deliverables: a fused BEV-fusion CUDA operator that aligns 11-camera and LiDAR features in a single kernel, and the training of an AI planner that outputs motion and planning in parallel from a shared query decoder.
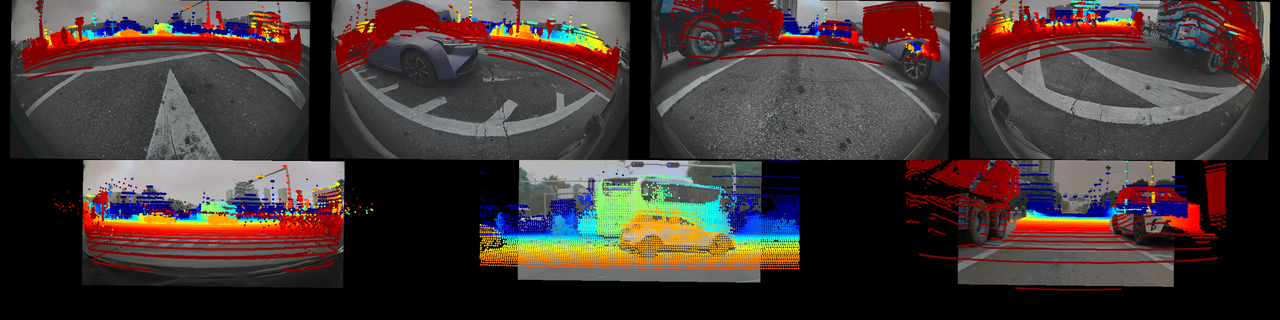
11V surround + LiDAR
SparseDrive-style sparse stack
Fused CUDA operator
Detection · tracking · map
Parallel motion + planning
11V7 pinhole + 4 fisheye cameras
1 kernelSample, weight, and reduce fused
<3 pts3D gap vs dense BEVDet-style baseline
2 ownedCUDA fusion + AI-planner training
System logic
Fusion operator
Dense BEV costSparse representation for efficiency
Naive 3 passesOne fused kernel, HBM ×1
Serial planningParallel motion + ego planning
One-way predictionBidirectional, game-aware queries
Turn-around result
My role.
2024 · Collaboration with Lantu; author owned the fused BEV-fusion CUDA operator and AI-planner training. Details are high-level and sanitized.
Confidentiality note.
Only high-level architecture and sanitized visual materials are shown. Customer-specific data, calibration, and internal performance numbers are omitted. The original source listed an inconsistent interval; a neutral '2024 · Collaboration' label is shown instead.