Publications
Research with visual evidence.
My research centers on generative world models , scene flow, LiDAR odometry,
3D/4D perception, and end-to-end driving. Looking ahead, I am building toward
closed-loop simulation that couples reconstruction with one-step generation,
streaming generation, and one-step video / image synthesis.
Generative World Models
Scene Flow
LiDAR Odometry
3D / 4D Perception
End-to-End Driving
All
World Models
Generative
Scene Flow
LiDAR Odometry
Perception
E2E Driving
ICML
Accepted · Spotlight
2026
VectorWorld: Efficient Streaming World Model via Diffusion Flow on Vector Graphs
Chaokang Jiang , Desen Zhou, Jiuming Liu, Kevin Li Sun
Bosch China
Research Collaboration
A streaming world model for autonomous-driving scenarios built on vector-graph diffusion flow.
Contribution. It aims to make future scene evolution modeling more efficient by operating on compact vectorized scene representations.
arXiv
Preprint
2026
RegFormer++: An Efficient Large-Scale 3D LiDAR Point Registration Network with Projection-Aware 2D Transformer
Jiuming Liu, Guangming Wang, Zhe Liu, Chaokang Jiang , Haoang Li, Mengmeng Liu, Tianchen Deng, Marc Pollefeys, Michael Ying Yang, Hesheng Wang
Research Collaboration
A large-scale 3D LiDAR point registration network with projection-aware transformer design.
Contribution. It improves registration efficiency and scalability by coupling 3D point registration with projection-aware 2D transformer modeling.
T-PAMI
Published
2026
DifFlow3D: Hierarchical Diffusion Models for Uncertainty-Aware 3D Scene Flow Estimation
Jiuming Liu, Weicai Ye, Guangming Wang, Chaokang Jiang , Lei Pan, Jinru Han, Zhe Liu, Guofeng Zhang, Hesheng Wang
Research Collaboration
A journal version of diffusion-based uncertainty-aware 3D scene flow estimation.
Contribution. It extends the diffusion formulation into a hierarchical framework for more robust and uncertainty-aware point motion estimation.
TITS
Published
2025
Unsupervised Learning of 3D Scene Flow With LiDAR Odometry Assistance
Guangming Wang, Zhiheng Feng, Chaokang Jiang , Jiuming Liu, Hesheng Wang
SJTU IRMV
Research Collaboration
An unsupervised 3D scene flow learning method assisted by LiDAR odometry.
Contribution. It leverages odometry cues to reduce the dependency on dense point-level motion labels.
CVPR
Published
2025
Mamba4D: Efficient 4D Point Cloud Video Understanding with Disentangled Spatial-Temporal State Space Models
Jiuming Liu, Jinru Han, Lihao Liu, Angelica I. Avilés-Rivero, Chaokang Jiang , Zhe Liu, Hesheng Wang
Research Collaboration
A 4D point cloud video understanding framework based on disentangled spatial-temporal state space modeling.
Contribution. It improves long-sequence point cloud video modeling efficiency through separate spatial and temporal sequence reasoning.
arXiv
Preprint
2025
GMF-Drive: Gated Mamba Fusion with Spatial-Aware BEV Representation for End-to-End Autonomous Driving
Jian Wang, Chaokang Jiang , Haitao Xu
Research Collaboration
An end-to-end autonomous-driving model with gated Mamba fusion and spatial-aware BEV representation.
Contribution. It explores sequence modeling and BEV feature fusion for integrated autonomous-driving decision pipelines.
arXiv
Preprint
2025
D^2GSLAM: 4D Dynamic Gaussian Splatting SLAM
Siting Zhu, Yuxiang Huang, Wenhua Wu, Chaokang Jiang , Yongbo Chen, I-Ming Chen, Hesheng Wang
Research Collaboration
A dynamic SLAM framework based on 4D Gaussian splatting.
Contribution. It models dynamic scene structure with Gaussian representations for SLAM in changing environments.
CVPR
Published
2024
DifFlow3D: Toward Robust Uncertainty-Aware Scene Flow Estimation with Iterative Diffusion-Based Refinement
Jiuming Liu, Guangming Wang, Weicai Ye, Chaokang Jiang , Jinru Han, Zhe Liu, Guofeng Zhang, Dalong Du, Hesheng Wang
SJTU IRMV
Research Collaboration
A diffusion-based 3D scene flow method for robust and uncertainty-aware point motion estimation.
Contribution. It formulates scene flow refinement as an iterative diffusion process to better handle uncertainty and challenging motion.
CVPR
Published
2024
3DSFLabelling: Boosting 3D Scene Flow Estimation by Pseudo Auto-labelling
Chaokang Jiang , Guangming Wang, Jiuming Liu, Hesheng Wang, Zhuang Ma, Zhenqiang Liu, Zhujin Liang, Yi Shan, Dalong Du
SJTU IRMV
PhiGent Robotics
Research Collaboration
A pseudo auto-labeling framework that provides high-quality 3D motion flow labels for LiDAR point clouds.
Contribution. It reduces the scarcity of point-level 3D motion labels and improves downstream scene flow estimation.
NeurIPS
Published
2024
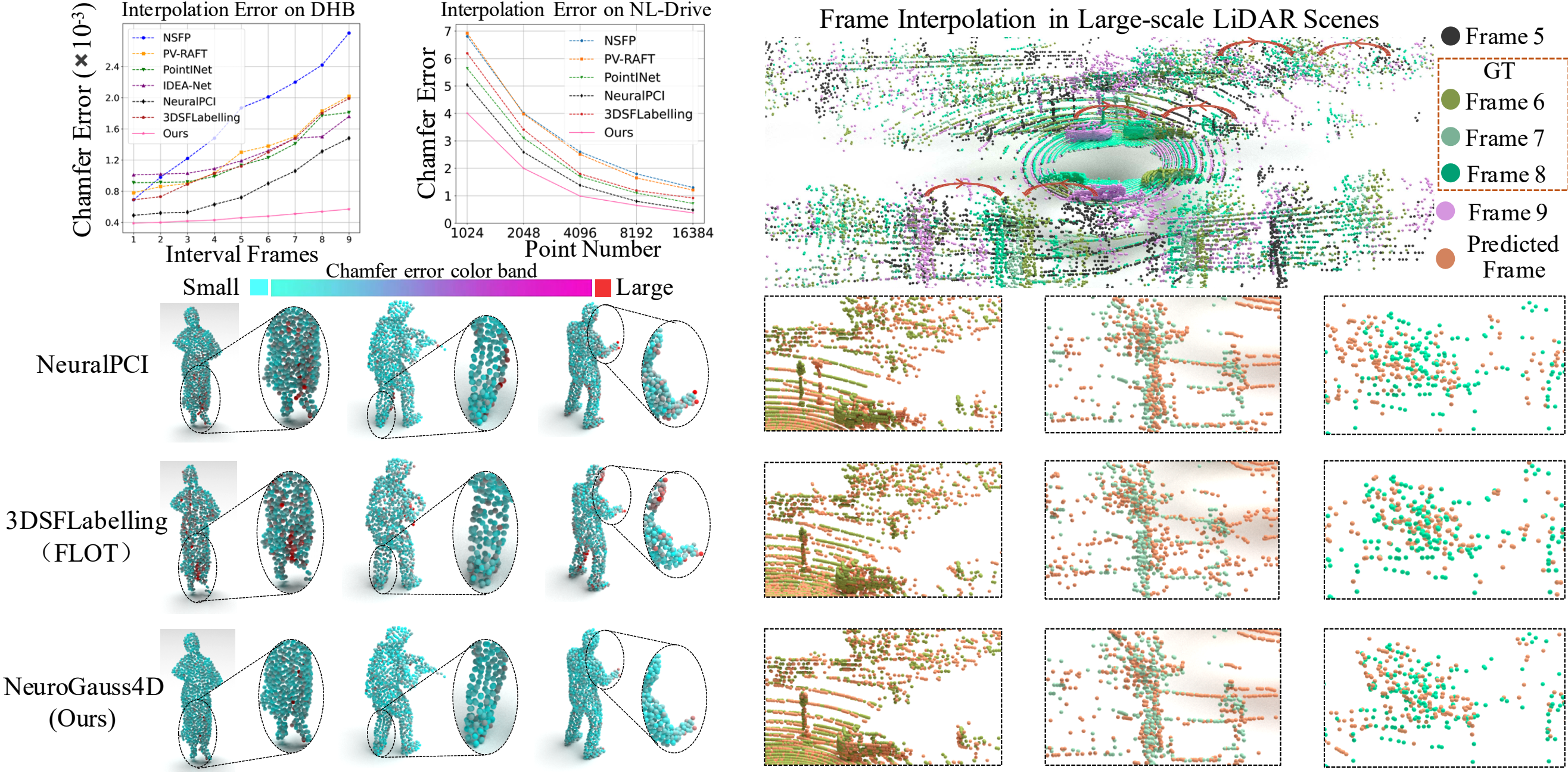
NeuroGauss4D-PCI: 4D Neural Fields and Gaussian Deformation Fields for Point Cloud Interpolation
Chaokang Jiang , Dalong Du, Jiuming Liu, Siting Zhu, Zhenqiang Liu, Zhuang Ma, Zhujin Liang, Jie Zhou
Research Collaboration
A 4D point cloud interpolation framework using neural fields and Gaussian deformation fields.
Contribution. It reconstructs temporally continuous point clouds by combining neural field representation with deformation-aware Gaussian modeling.
TII
Published
2023
3-D Scene Flow Estimation on Pseudo-LiDAR: Bridging the Gap on Estimating Point Motion
Chaokang Jiang , Guangming Wang, Yanzi Miao, Hesheng Wang
CUMT
SJTU IRMV
A 3D scene flow estimation study on pseudo-LiDAR point representations.
Contribution. It bridges image-derived pseudo-LiDAR representations and point motion estimation for 3D scene understanding.
TIM
Published
2023
Pseudo-LiDAR for Visual Odometry
Yanzi Miao, Huiying Deng, Chaokang Jiang , Zhiheng Feng, Xinrui Wu, Guangming Wang, Hesheng Wang
CUMT
SJTU IRMV
A visual odometry method using pseudo-LiDAR representations.
Contribution. It leverages pseudo-LiDAR geometry to improve visual odometry estimation.
AAAI
Published
2023
TransLO: A Window-Based Masked Point Transformer Framework for Large-Scale LiDAR Odometry
Jiuming Liu, Guangming Wang, Chaokang Jiang , Liu Zhe, Hesheng Wang
SJTU IRMV
Research Collaboration
A masked point transformer framework for large-scale LiDAR odometry.
Contribution. It introduces window-based transformer modeling to improve LiDAR odometry scalability.
ICCV
Published
2023
RegFormer: An Efficient Projection-Aware Transformer Network for Large-Scale Point Cloud Registration
Jiuming Liu, Guangming Wang, Zhe Liu, Chaokang Jiang , Marc Pollefeys, Hesheng Wang
SJTU IRMV
Research Collaboration
A projection-aware transformer network for large-scale point cloud registration.
Contribution. It improves point cloud registration by combining projection-aware representation with efficient transformer reasoning.
AIS
Published
2022
SFGAN: Unsupervised Generative Adversarial Learning of 3D Scene Flow from the 3D Scene Self
Guangming Wang, Chaokang Jiang , Zehang Shen, Yanzi Miao, Hesheng Wang
CUMT
SJTU IRMV
An unsupervised adversarial learning framework for 3D scene flow.
Contribution. It learns scene flow from self-structured 3D scene signals without dense supervised motion labels.
arXiv
Preprint
2022
FFPA-Net: Efficient Feature Fusion with Projection Awareness for 3D Object Detection
Chaokang Jiang , Guangming Wang, Jinxing Wu, Yanzi Miao, Hesheng Wang
CUMT
SJTU IRMV
A projection-aware feature fusion method for 3D object detection.
Contribution. It improves multi-modal 3D detection by indexing and fusing image and point cloud features more efficiently.