Production + Research Project
4D Auto-Labeling & Pure LiDAR 3D Detection
Two eras of autonomous-driving auto-labeling — a Tesla-inspired vision-only 4D pipeline, then a multi-modal and pure-LiDAR 3D detection system.
Overview
What is this project about?
A two-phase journey in autonomous-driving auto-labeling: first a Tesla-AI-Day-inspired vision-only 4D auto-labeling pipeline with Hozon Auto and SJTU IRMV, then a multi-modal 4D auto-labeling and production pure-LiDAR 3D detection system at PhiGent Robotics — optimized at the data, model, and loss levels.
Same Direction, Two Eras
From vision-only 4D labels to pure-LiDAR detection
Both phases share one goal — automatically producing high-quality 4D training labels for autonomous driving — but differ in era, team, and sensor stack. The timeline below moves from a Tesla-inspired vision-only pipeline to a multi-modal + pure-LiDAR production system.
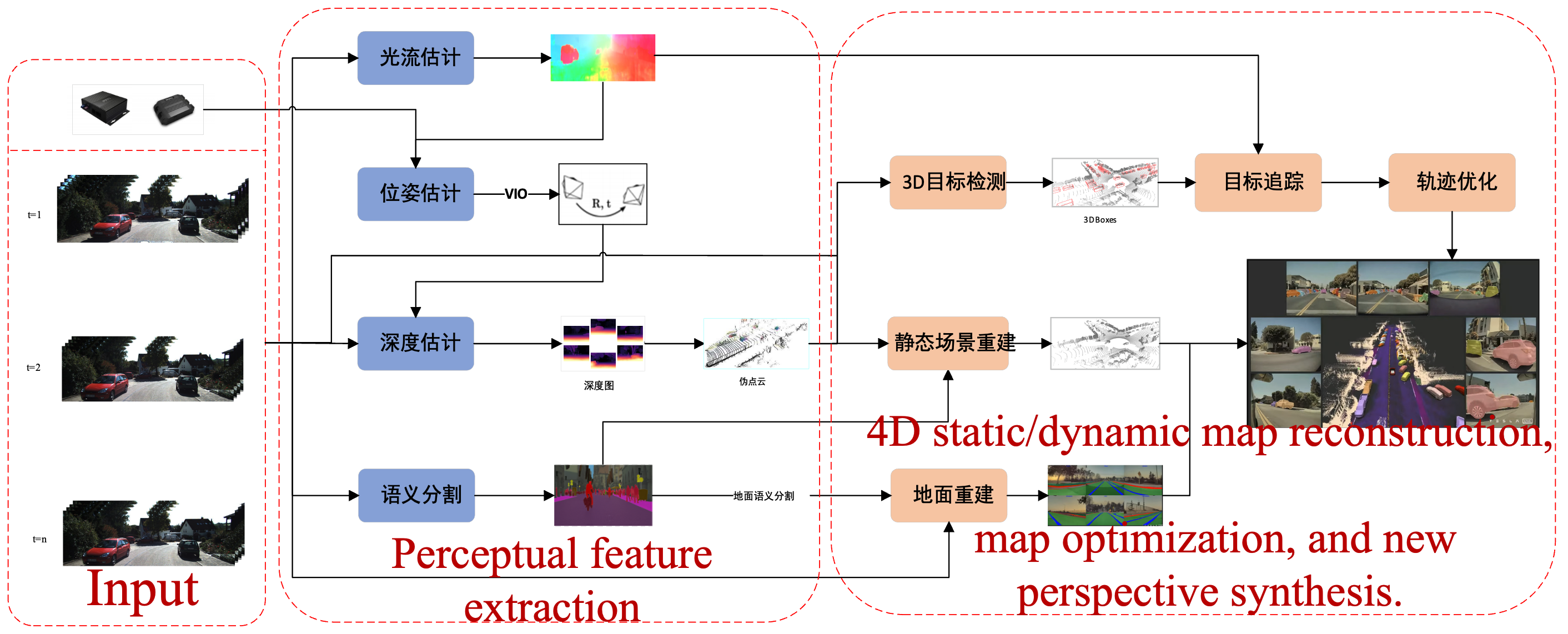
Video Offline 4D Auto-Labeling
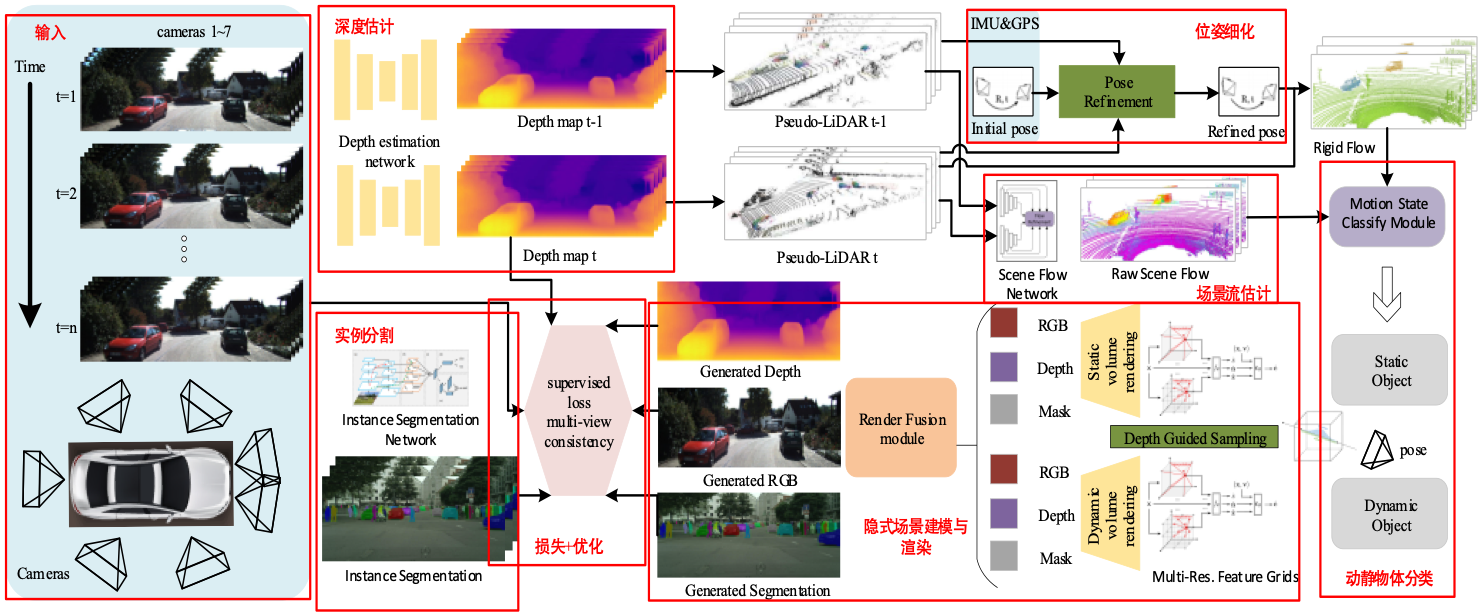
A vision-only offline pipeline replicating the spirit of Tesla AI Day: from multi-camera video + IMU, estimate surround depth, lift to a 360° pseudo-LiDAR, separate static and dynamic, and fuse everything into a 4D scene.
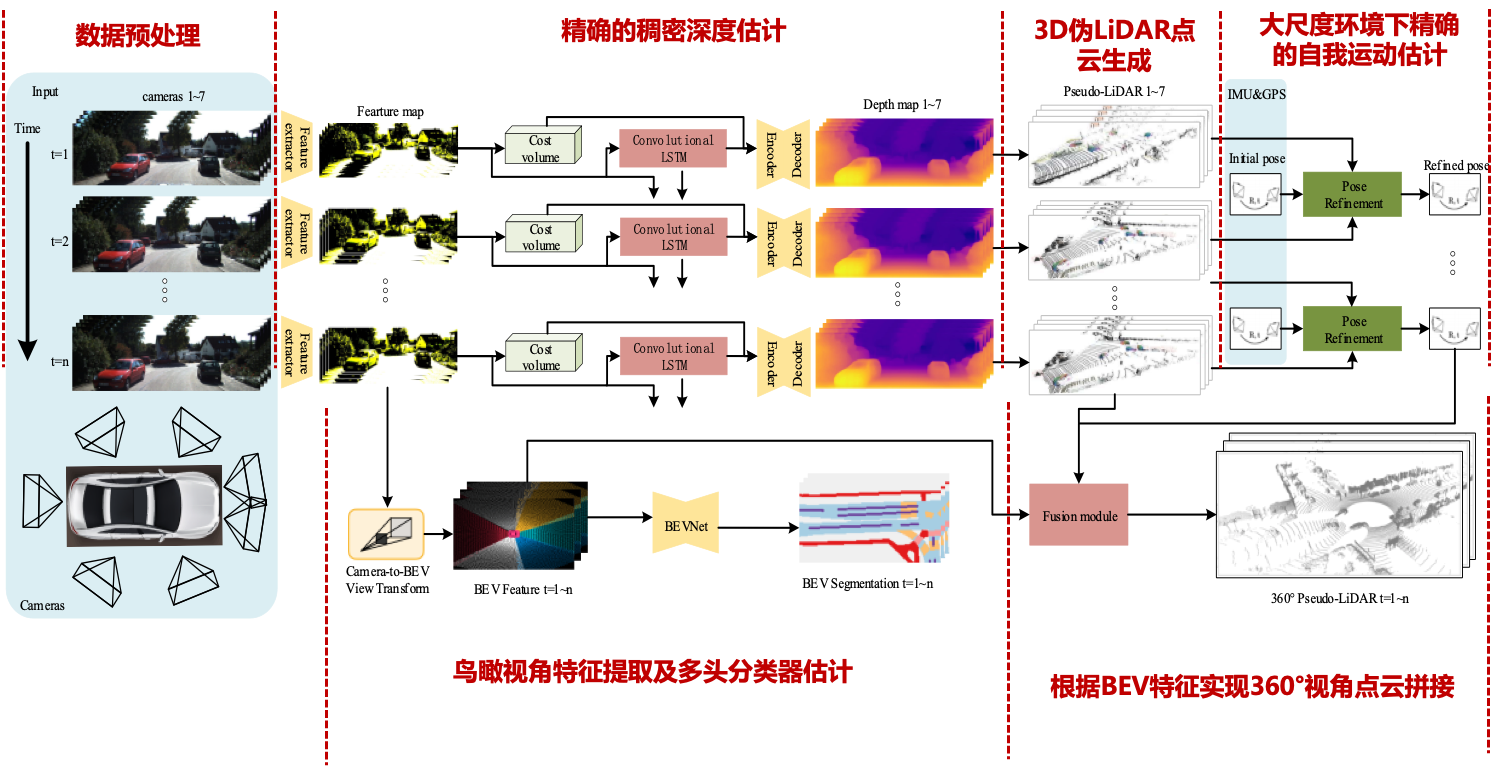
Surround-view depth → pseudo-LiDAR
- Multi-frame cost volume + Conv-LSTM + BEV fusion → 360° pseudo-LiDAR; IMU/GPS pose refinement
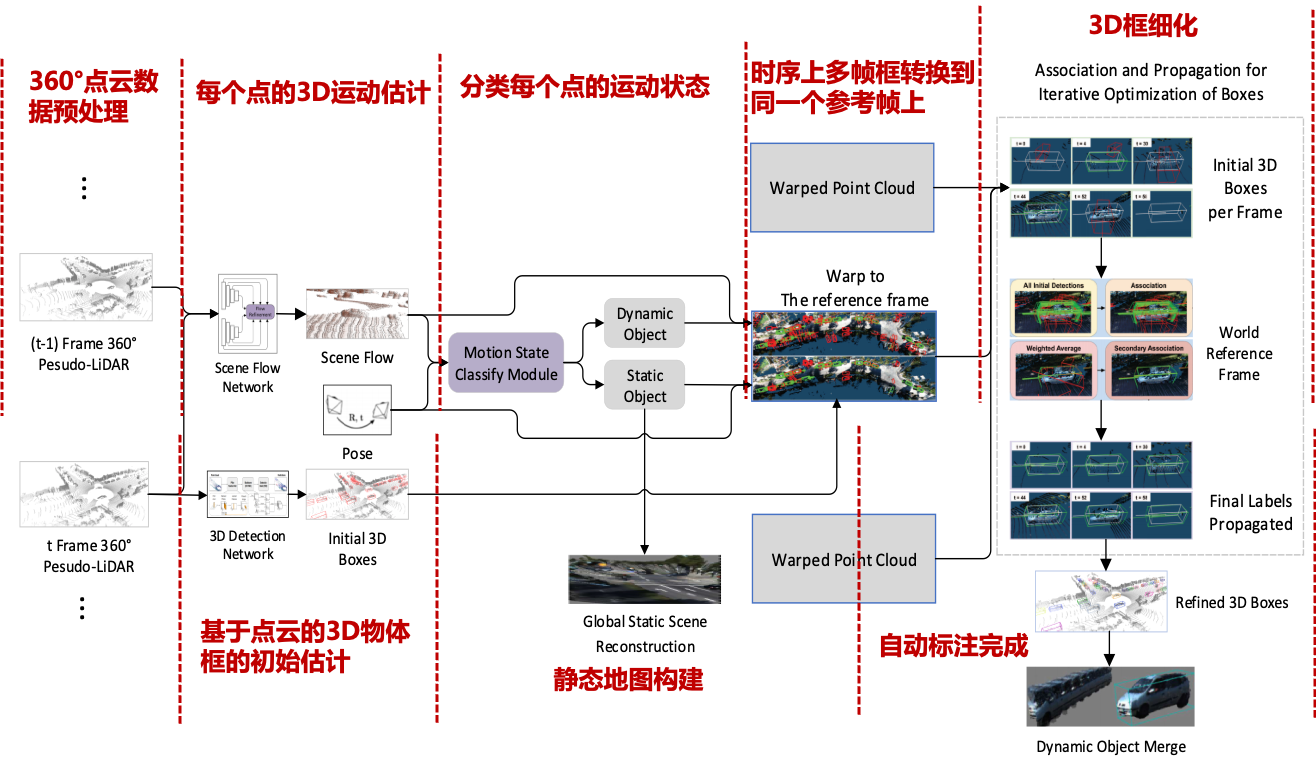
Perceptual features → motion state
- Optical flow · semantic/instance seg · scene flow → classify each point dynamic / static
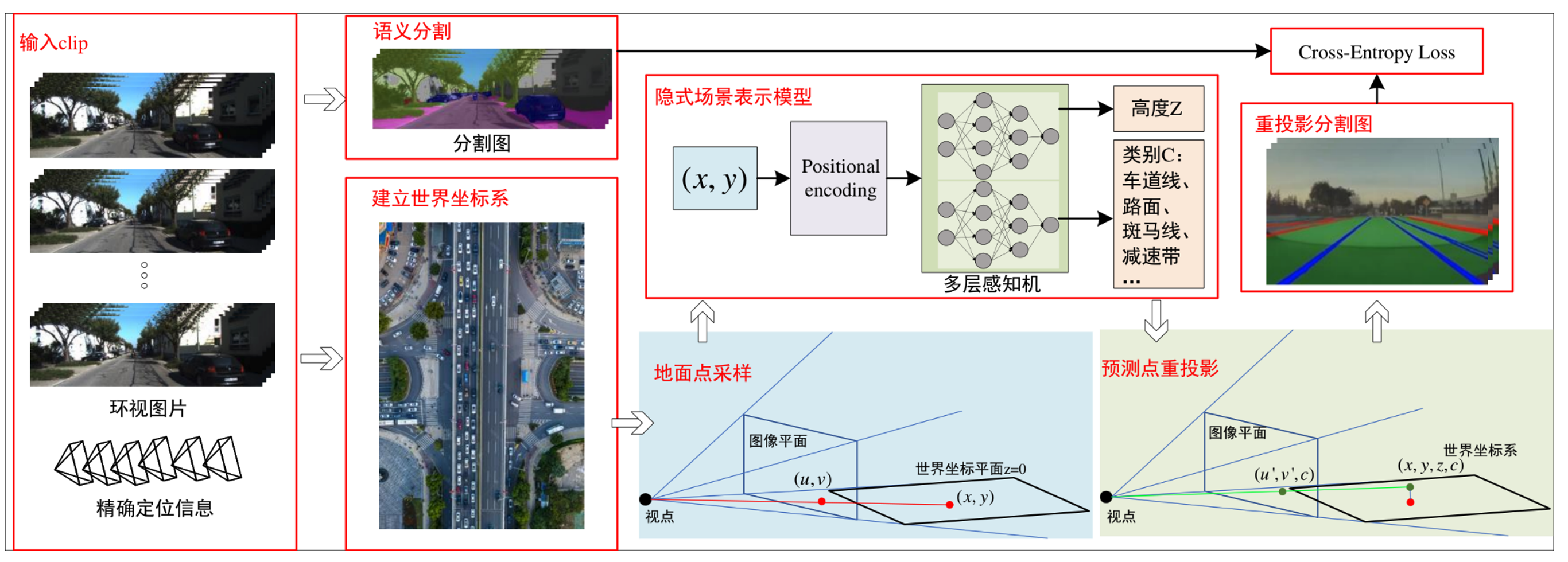
Scene reconstruction
- Warp multi-frame → global map; NeRF implicit ground + novel views
3D box labeling
- Per-point scene flow → align frames → associate & weighted-average 3D boxes
4D auto-labels
- HD-map + 3D tracks + segmentation + synthetic views → time × space × semantics × motion
4D Auto-Labeling & Pure LiDAR 3D Detection
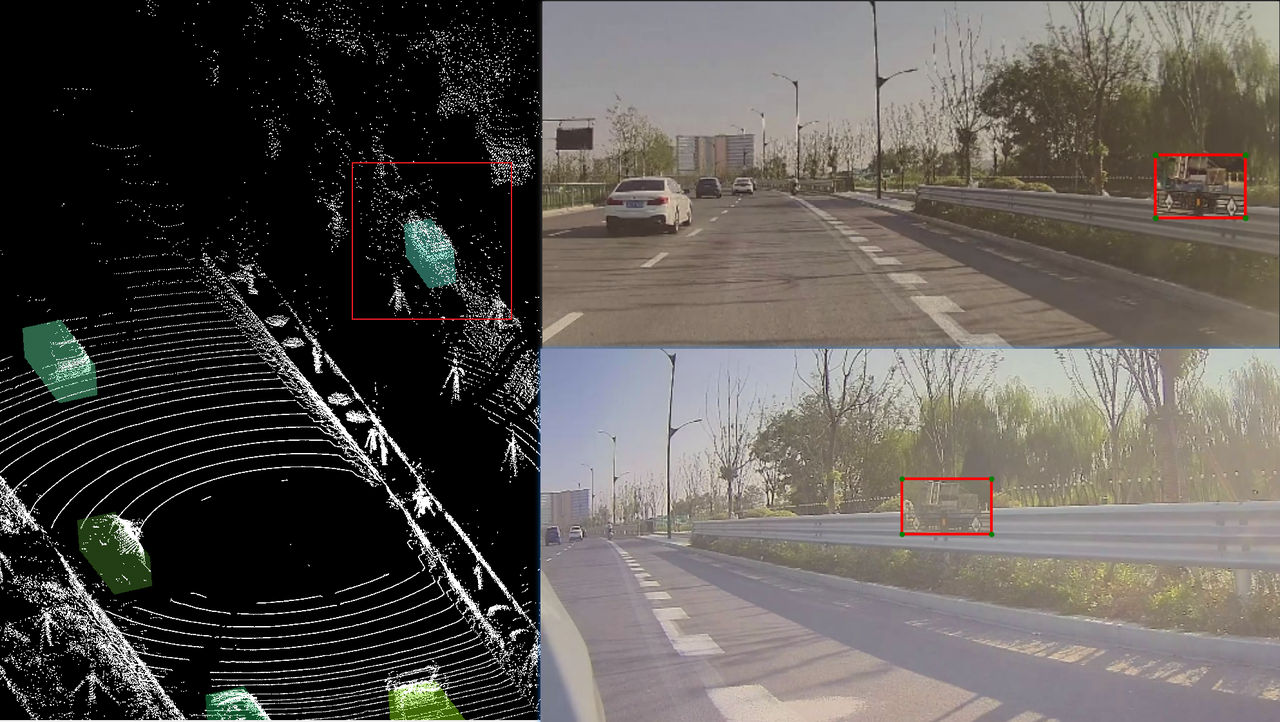
Moving to a multi-modal stack: harden a BEVFusion-based 4D auto-labeler on hard objects (VRUs, long trailers, far range), then ship a production pure-LiDAR 3D detector on solid-state LiDAR.
Workstream A · Data level
Adaptive VRU instance augmentation
VRUs (pedestrians, cyclists) are safety-critical but heavily under-represented. We build a VRU instance database and adaptively paste real instances into scenes to rebalance training.
Instance mining
- Extract every VRU: RGB patch + LiDAR segment + spatial meta (position / depth / pose)
Layered index
- Index by class / distance band / scene type → diverse coverage
Adaptive paste
- Scene depth → legal position; match scale / occlusion; paste into image + point cloud jointly
Label synchronization
- Auto-generate 2D BBox / 3D BBox / mask → complete supervision
Workstream B · Model level
BEV range & resolution tuning
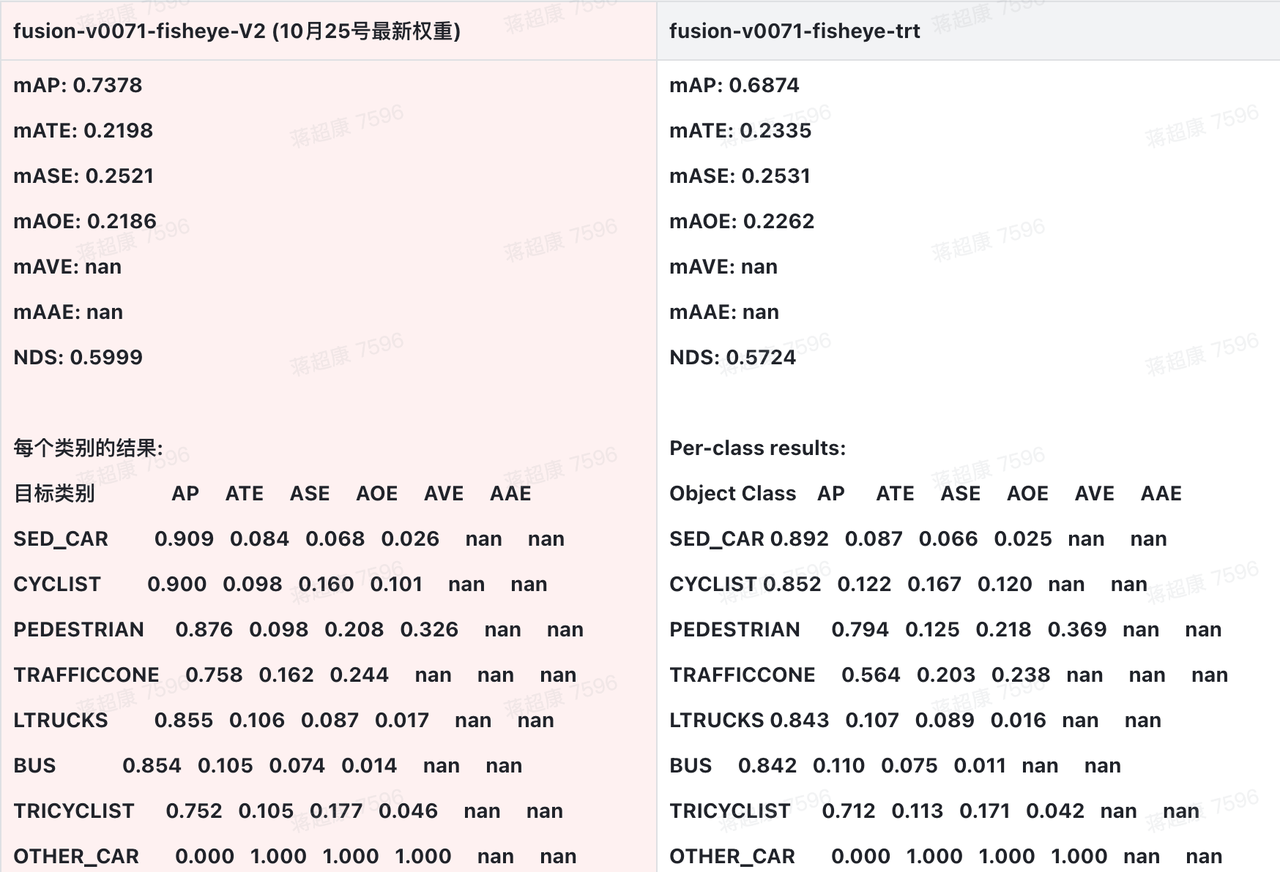
Clamp the perception range to ≤ 210 m and raise BEV resolution, so far-field features stay dense — directly improving very-long-range 3D detection during training and release.
Before
Range > 210 m
Low BEV resolution
Far-field features sparse → weak long-range recall
After
Range ≤ 210 m
High BEV resolution
Far-field features dense → stronger long-range 3D detection
Workstream C · Loss level
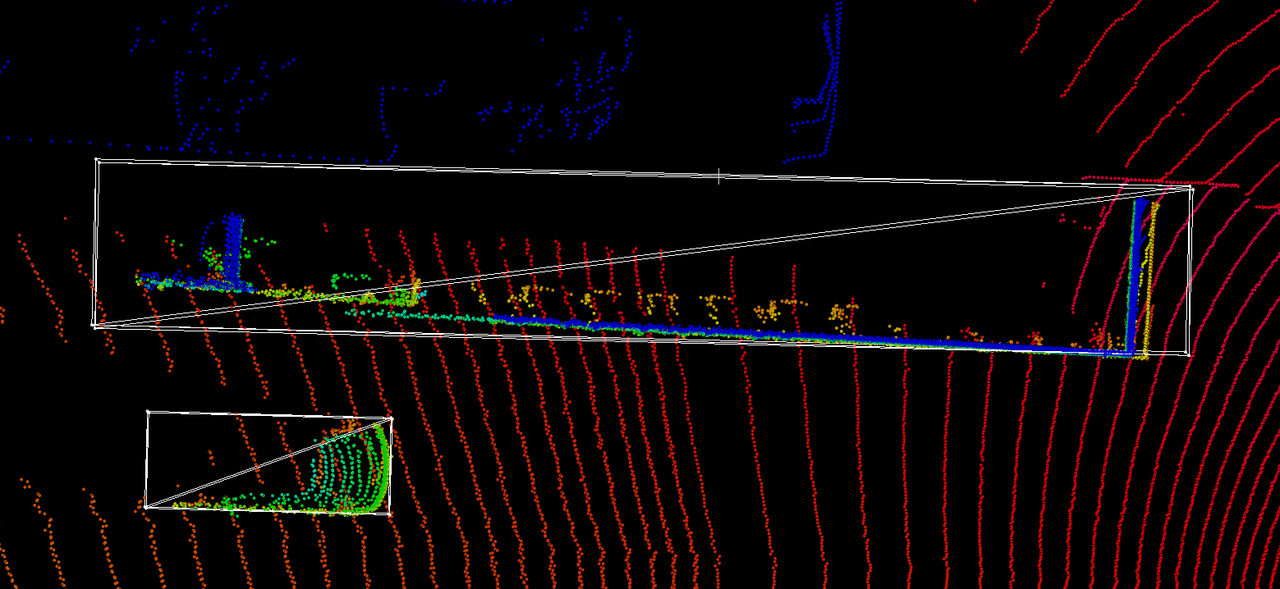
Ultra-long trailer: geometry-alignment loss
Articulated trailers bend when turning, so a single box never fits and heading drifts. We add multi-box labeling for multi-section trailers and a loss that forces box boundaries to hug the LiDAR surface.
Articulated & occluded
- Tractor + trailer 1 + trailer 2 … each section a different angle → single box distorts IoU; sparse points
Multi-box supervision
- Hand-label multi-section trailers so the model learns to emit several boxes per vehicle
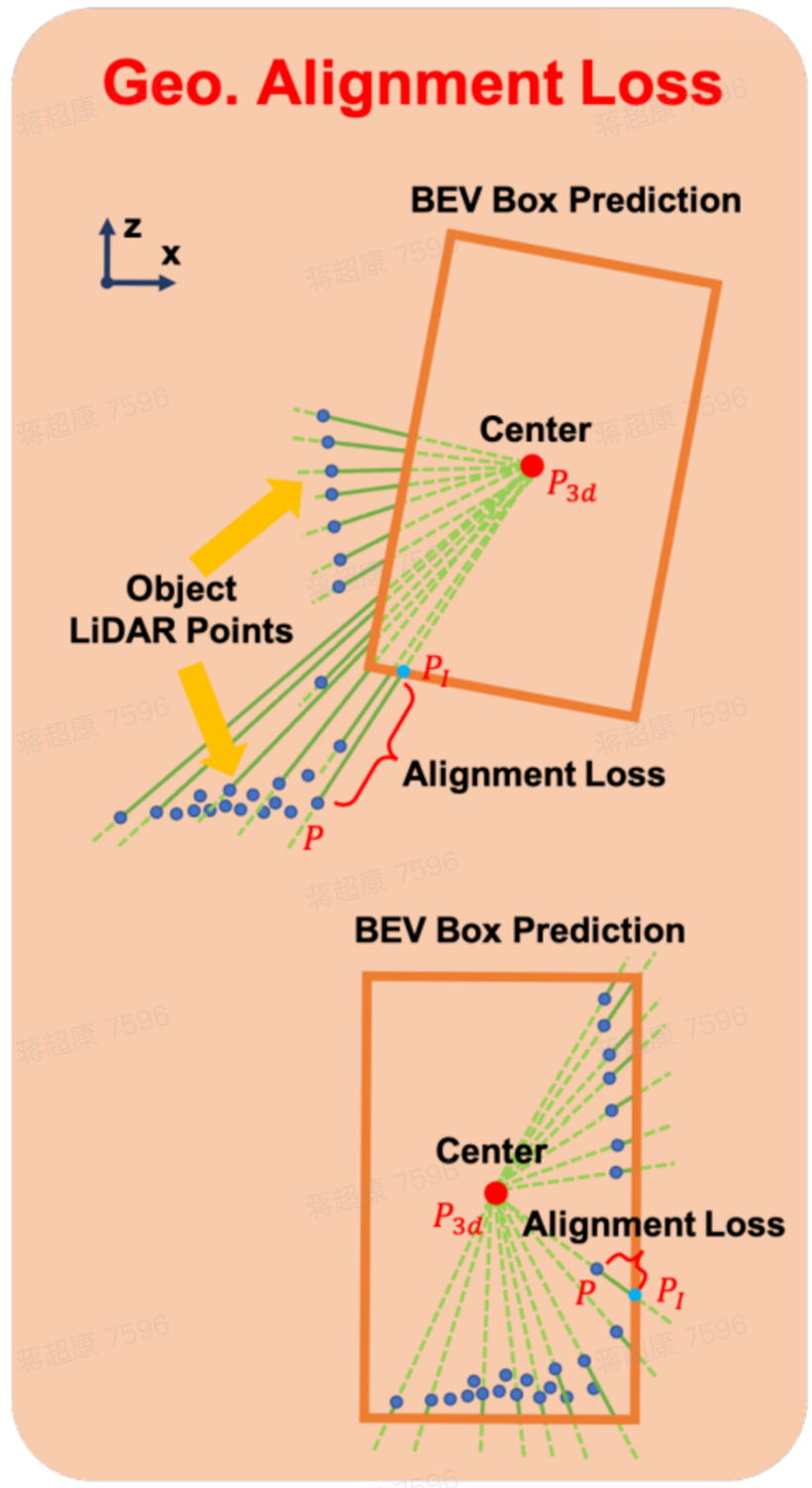
Point-to-boundary alignment
- For each LiDAR point P: cast a ray from box center through P
- Ray ∩ box boundary = P_l → Loss = dist(P, P_l)
- Point outside → loss rotates/translates the box onto the cloud; aligned → loss → 0
Tight, correctly-oriented boxes
- Boxes hug the trailer surface; heading error sharply reduced
Workstream D · Production · Seyond Falcon K1
Pure LiDAR 3D detection
A production 3D detector for solid-state LiDAR — an open pipeline redesigned around reflectivity features and dilated convolutions, tuned for the sparse far field.
Point-cloud preparation
- Range filter → RANSAC ground removal → reflectivity normalize → pillar voxelization
PillarFeatureNet
- Feature [x,y,z,intensity,x_c,y_c,z_c,x_p,y_p]; reflectivity is the core cue; hash voxelization + INT8 MLP
Sparse → dense BEV
- CUDA scatter via pillar-coordinate hash → dense pseudo-image (~35% faster end-to-end)
SECOND + Dilation FPN
- Dilated deconv d = 1,2,4 enlarges receptive field for sparse far-field context
CenterHead
- Center heatmap (GaussianFocalLoss) + regression (offset / z / size / rotation / velocity); NMS-free peak extraction
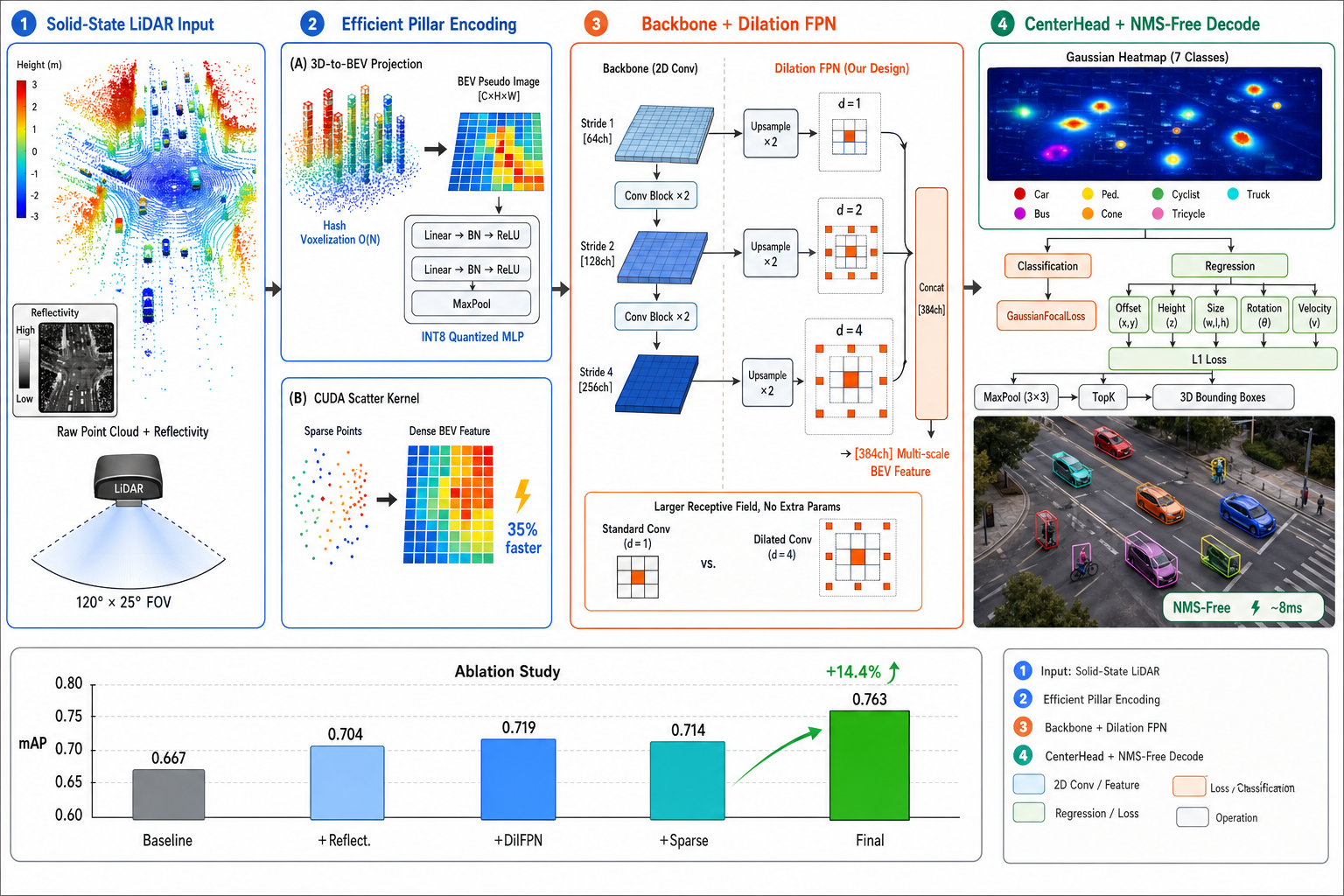
Ablation · mAP by class
What each idea contributes
| Method | mAP | Car | Bicycle | Pedestrian | Cone | Truck | Bus | Tricycle |
|---|---|---|---|---|---|---|---|---|
| Pillar features (baseline) | 0.667 | 0.959 | 0.835 | 0.710 | 0.722 | 0.628 | 0.863 | 0.615 |
| + Reflectivity | 0.704 | 0.966 | 0.861 | 0.780 | 0.787 | 0.653 | 0.873 | 0.715 |
| + Dilation FPN | 0.719 | 0.964 | 0.865 | 0.793 | 0.819 | 0.701 | 0.887 | 0.722 |
| Voxel sparse features | 0.714 | 0.954 | 0.874 | 0.838 | 0.844 | 0.586 | 0.839 | 0.775 |
| Reflectivity + dilated conv (final) | 0.763 | 0.968 | 0.909 | 0.885 | 0.907 | 0.780 | 0.892 | 0.760 |