World Models
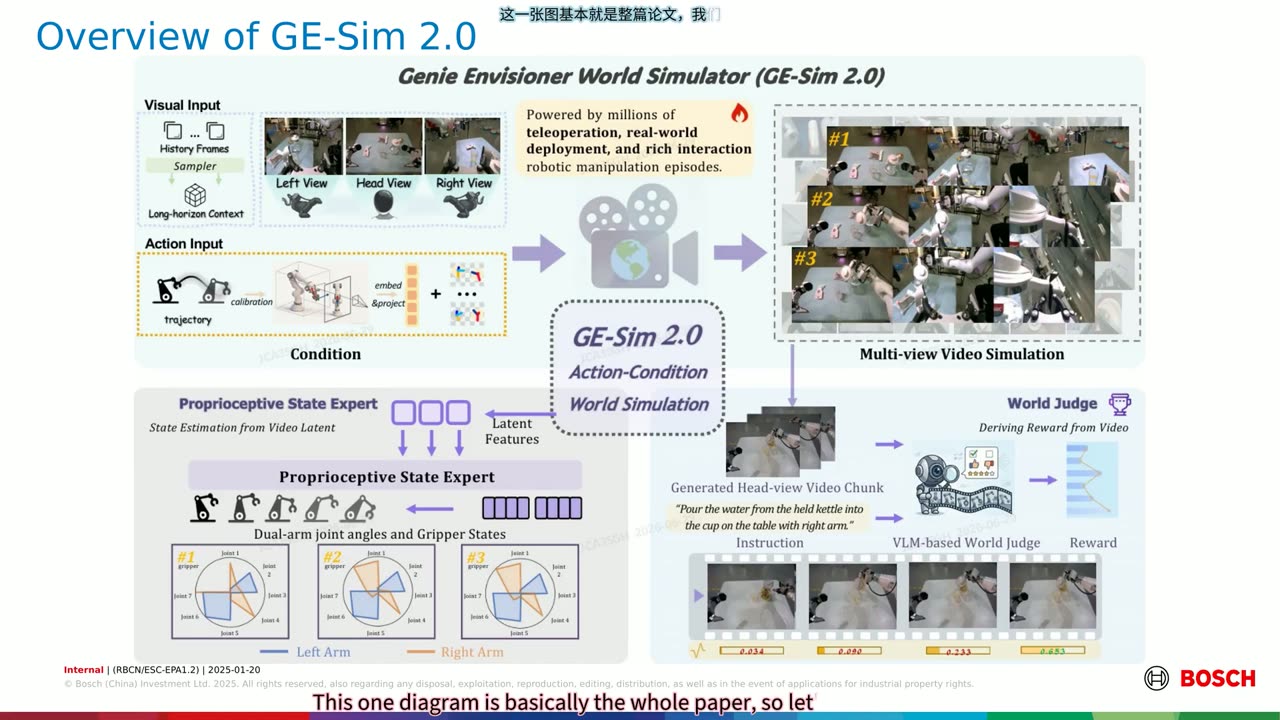
GE-Sim 2.0: a closed-loop video world simulator for manipulation
A talk on AgiBot Genie's GE-Sim 2.0 — turning a video generator into an environment robots can actually train and test in, via a ...
Blog
Durable notes and recorded walkthroughs — organized by topic. Each card is marked Note for written pieces or Talk for video explainers.
A talk on AgiBot Genie's GE-Sim 2.0 — turning a video generator into an environment robots can actually train and test in, via a ...
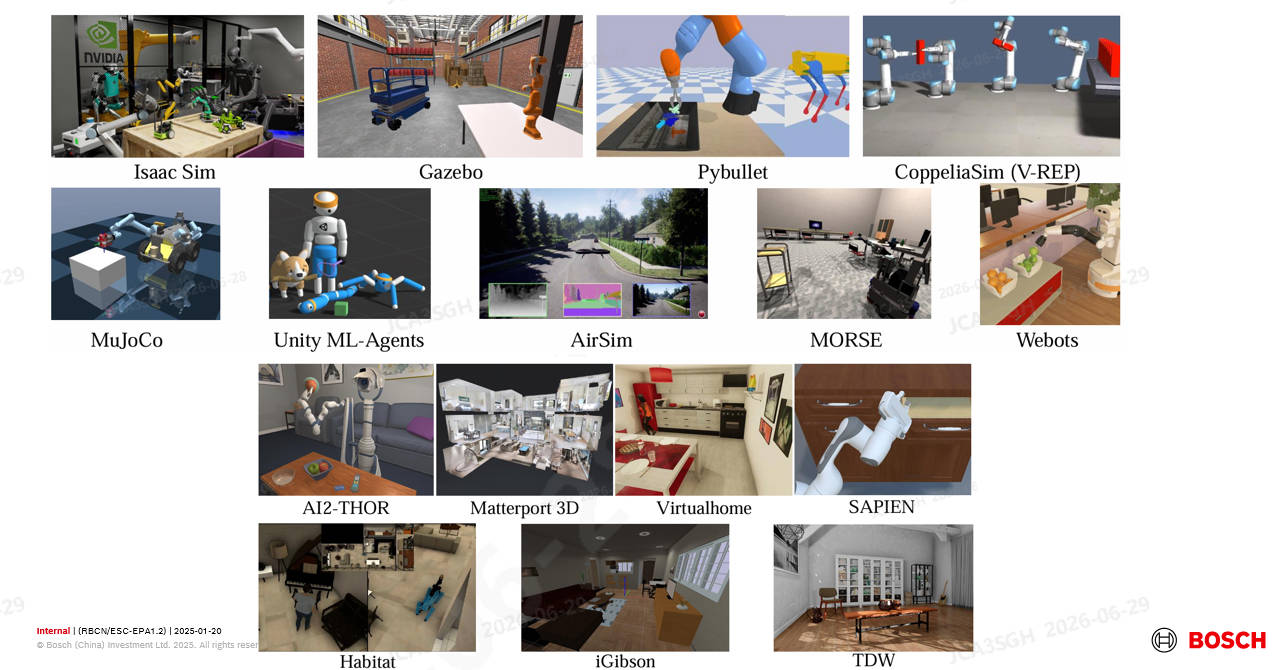
A three-part survey of embodied intelligence — robot bodies, simulators, perception and grasping; world models; and the duality o...
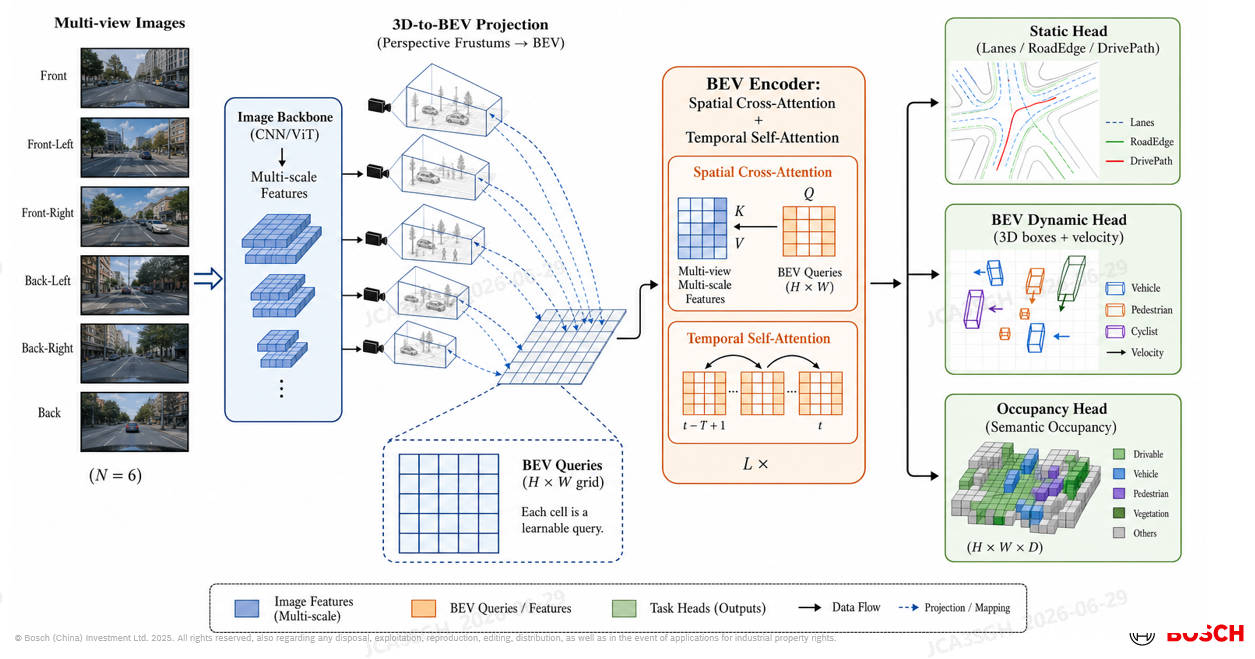
A talk through a complete AD stack — dual-brain domain control, multi-view + LiDAR perception, BEV and occupancy, online mapping,...
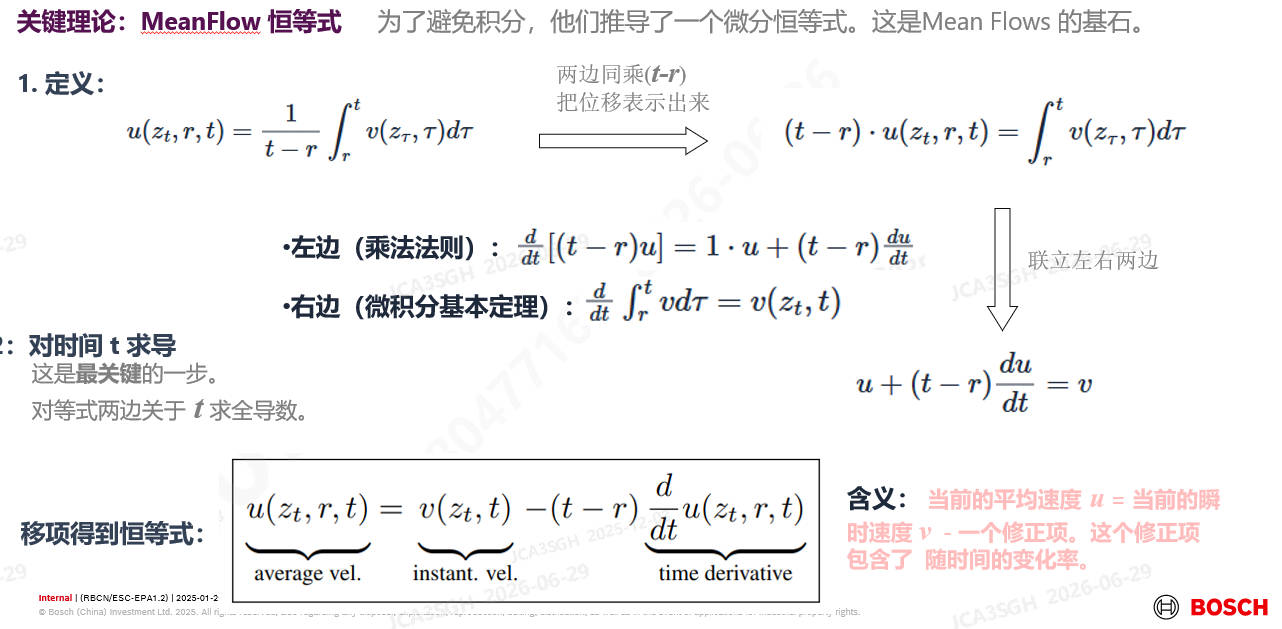
A four-paper walkthrough of He Kaiming's group compressing diffusion's hundreds of steps down to one — MeanFlow, improved iMF, dr...
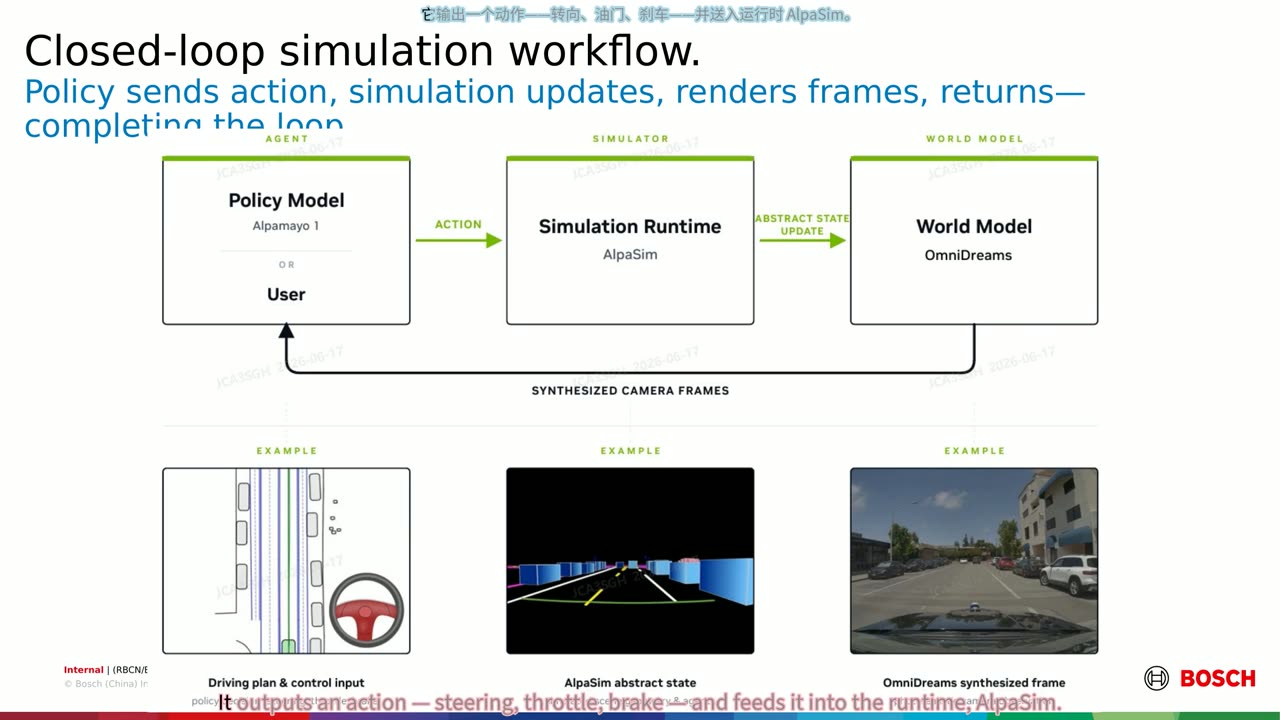
A talk walkthrough of NVIDIA's OmniDreams — a causal autoregressive DiT world model that closes the loop between policy and simul...
Reading ArtiFixer (SIGGRAPH 2026, NVIDIA Toronto AI Lab) — an interactive 3D logic atlas of the reconstruct → generate → distill-...
一份关于具身智能数据采集的工作笔记——在保真·接触、规模·成本、跨本体三者难以兼得的约束下,遥操作、仿真、UMI、Ego 各自下了什么赌注。
以 RECAP / π*0.6(真实世界做 RL)和 RISE(世界模型内做 RL)为两条主线,讲清楚 VLA 为什么单靠模仿学不好、两种破局路线各自的本质与代价。
Type to search across publications, projects, and blog notes.